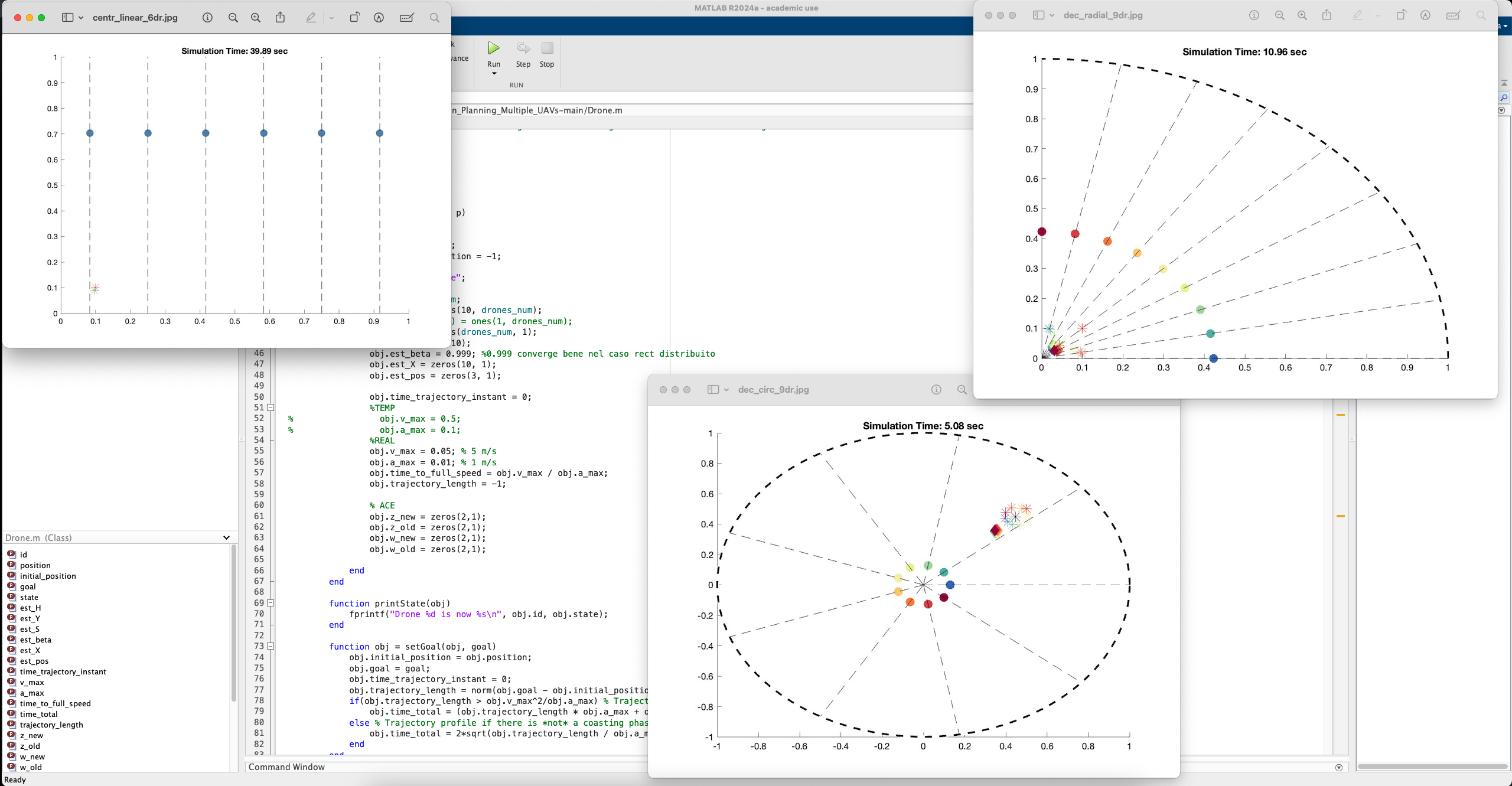
Optimal Motion Planning for Multiple UAVs
Re-implementation and extension of research for utilizing multiple UAV drones to find avalanche victims equipped
with Avalanche Victim Detectors (ARTVA).
Programming Language: Matlab
Go check it out
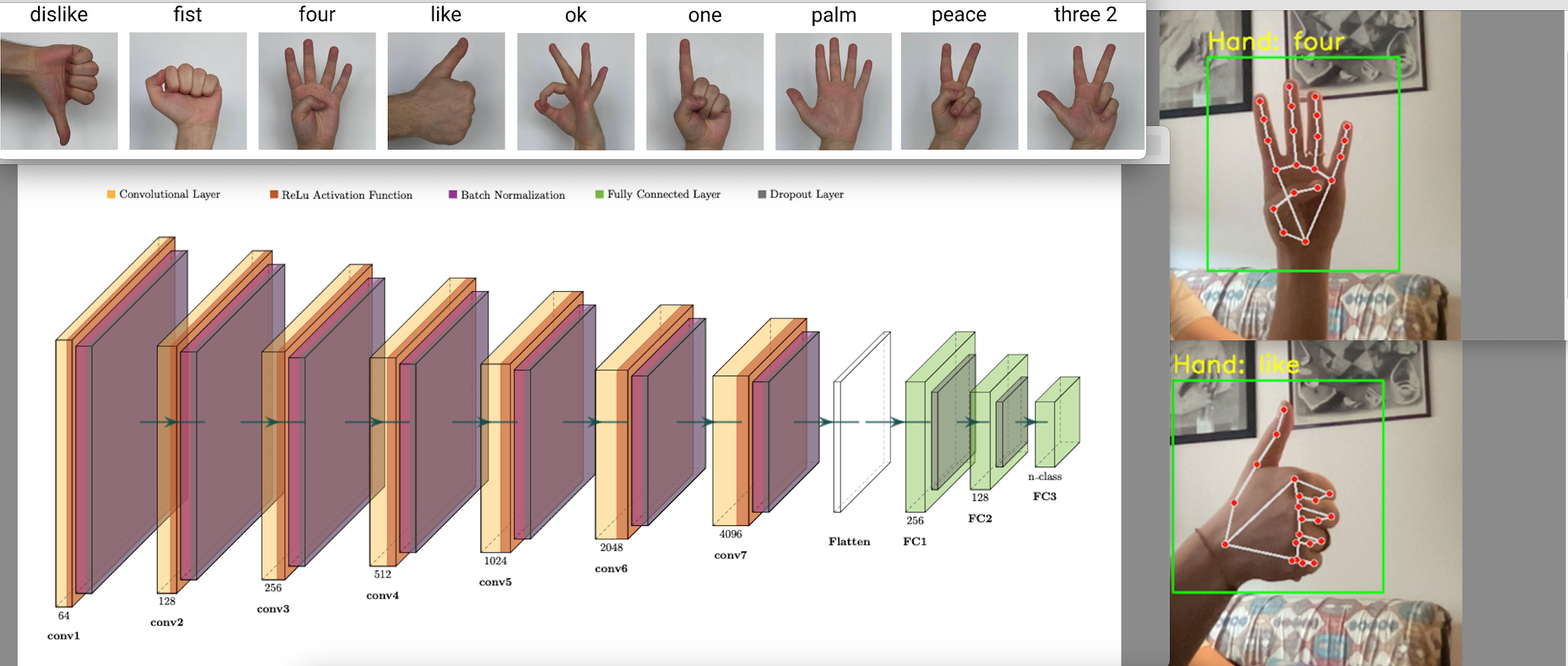
HandGesture CNN
Implementation of a custom CNN for embedded hand gesture recognition.
Programming Language: Python
Go check it out
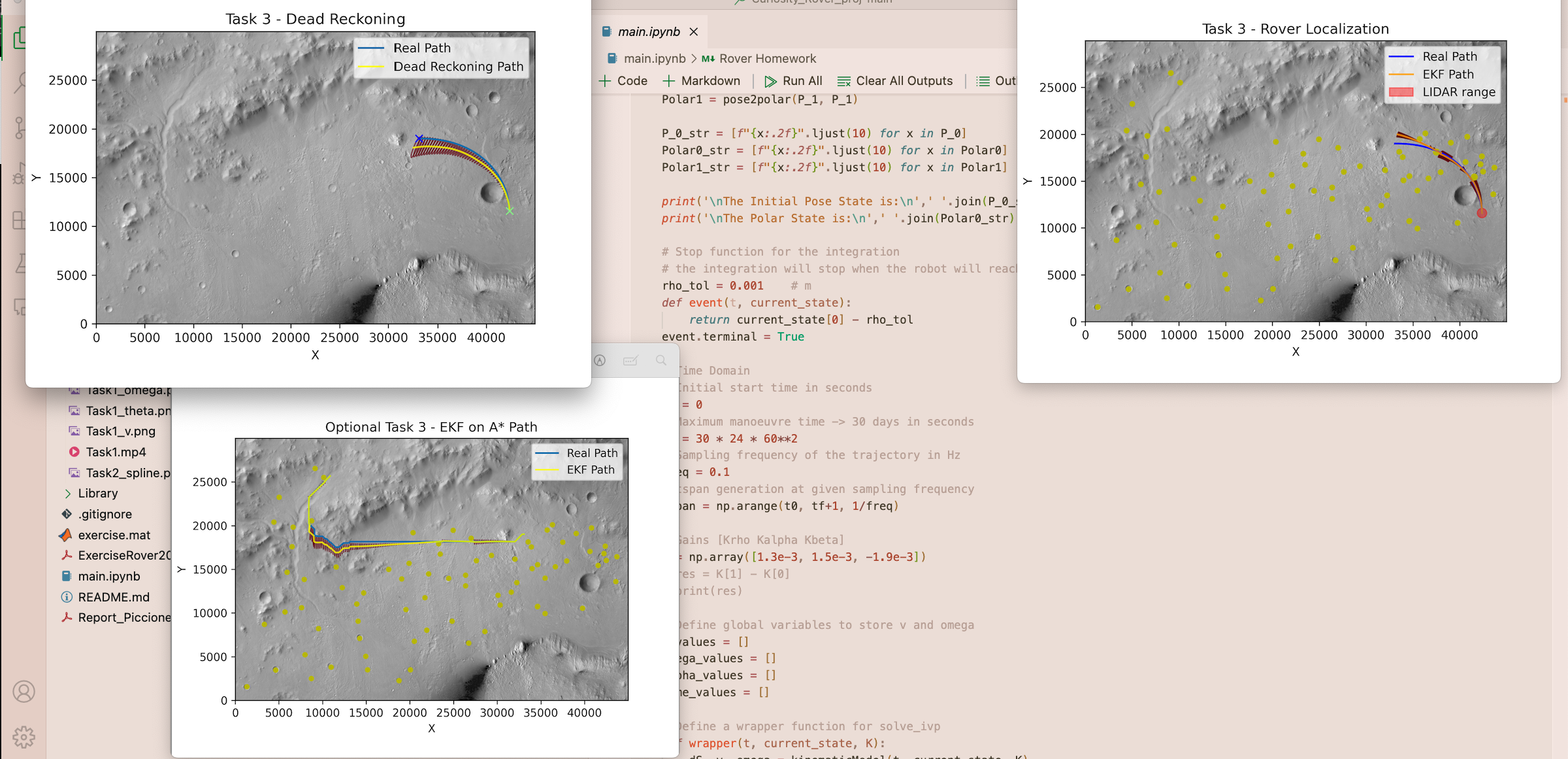
Curiosity Rover Motion Planning Simulation
Simulation of navigation, path planning, and localization of a Mars Rover, modeled after NASA’s Curiosity Rover, within a virtual representation of Gale Crater on Mars.
Programming Language: Python, Jupiter Notebook
Go check it out
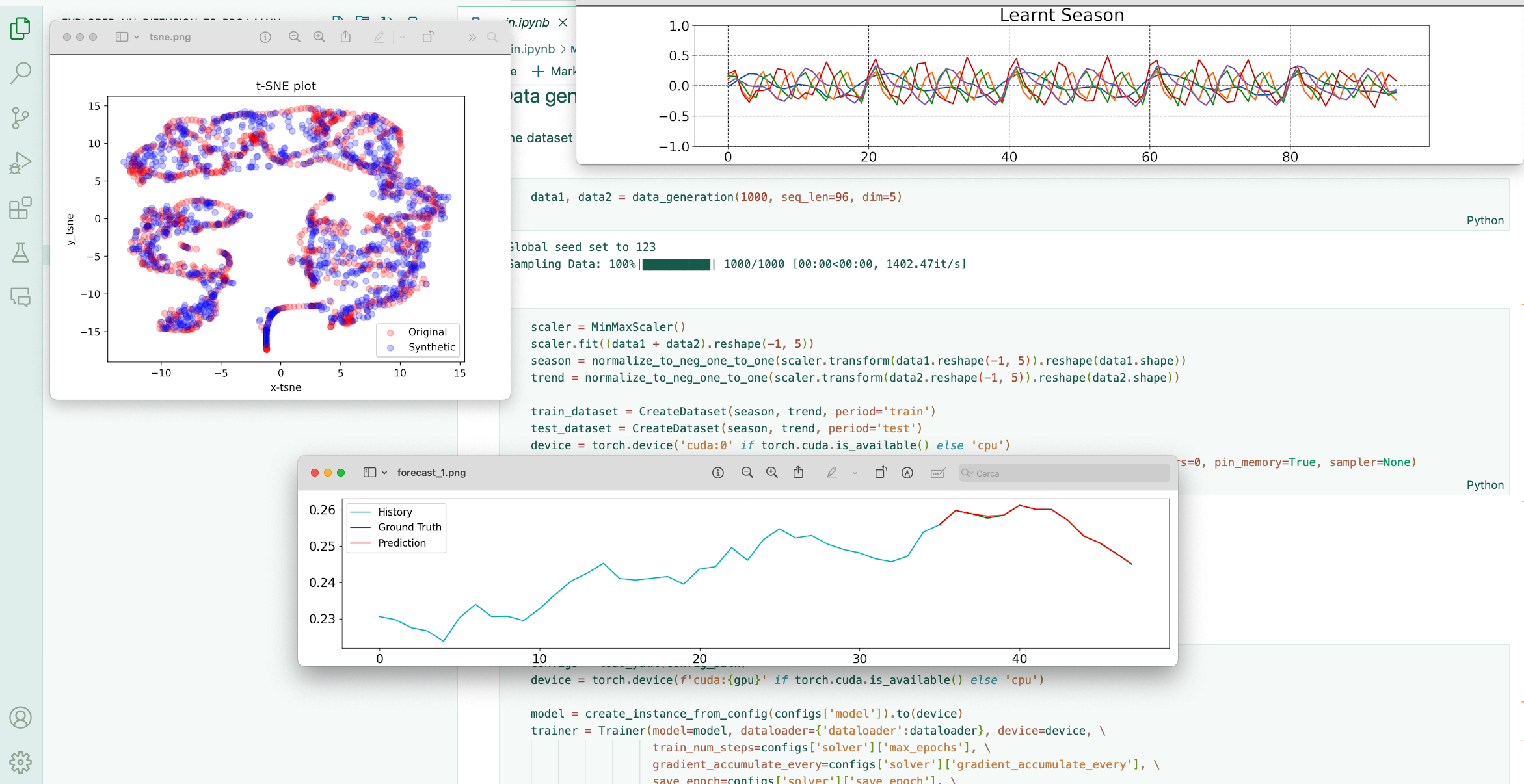
Diffusion-TS: interpretable diffusion for general time series generation
Re-implementation of the DIffusion-TS transformer model for time series generation that utilizes denoising diffusion probabilistic models integrated with interpretable seasonal-trend decomposition.
Programming Language: Python, Jupiter Notebook
Go check it out
Cat vs Toy - interactive 3D animated game
3D representation of a room scene with interactive cat, that follows the user's mouse, and other animated animals performing fixed animations moving in their space.
Programming Language: Javascript, HTML
Go check it out
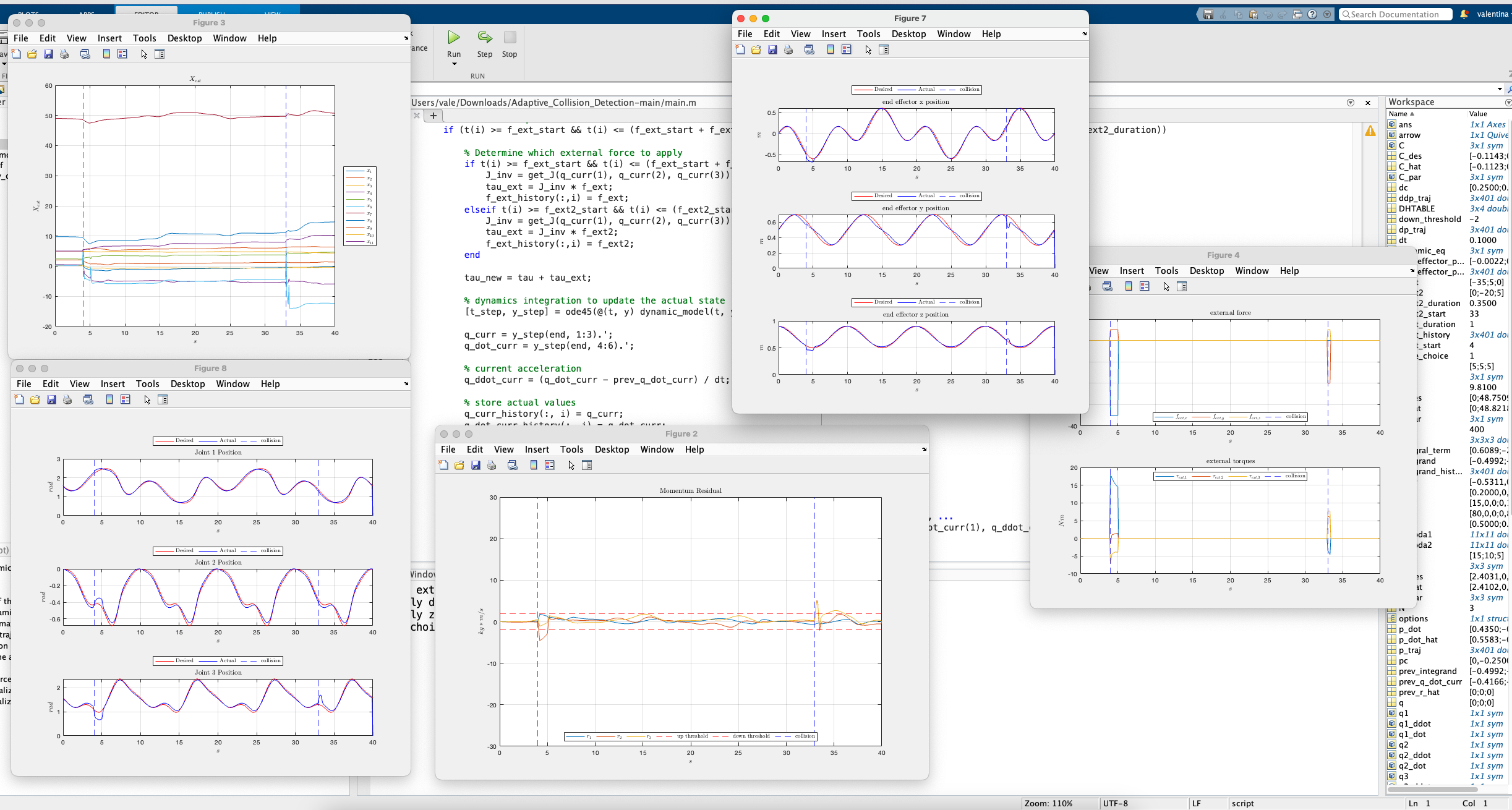
Adaptation of the Residual Vector of Unknown Dynamics
Implementation a model-based collision detection method for a spatial 3R manipulator, utilizing the residual between expected and actual momentum to detect collisions and adaptively updates robot’s dynamic parameters.
Programming Language: Matlab
Go check it out
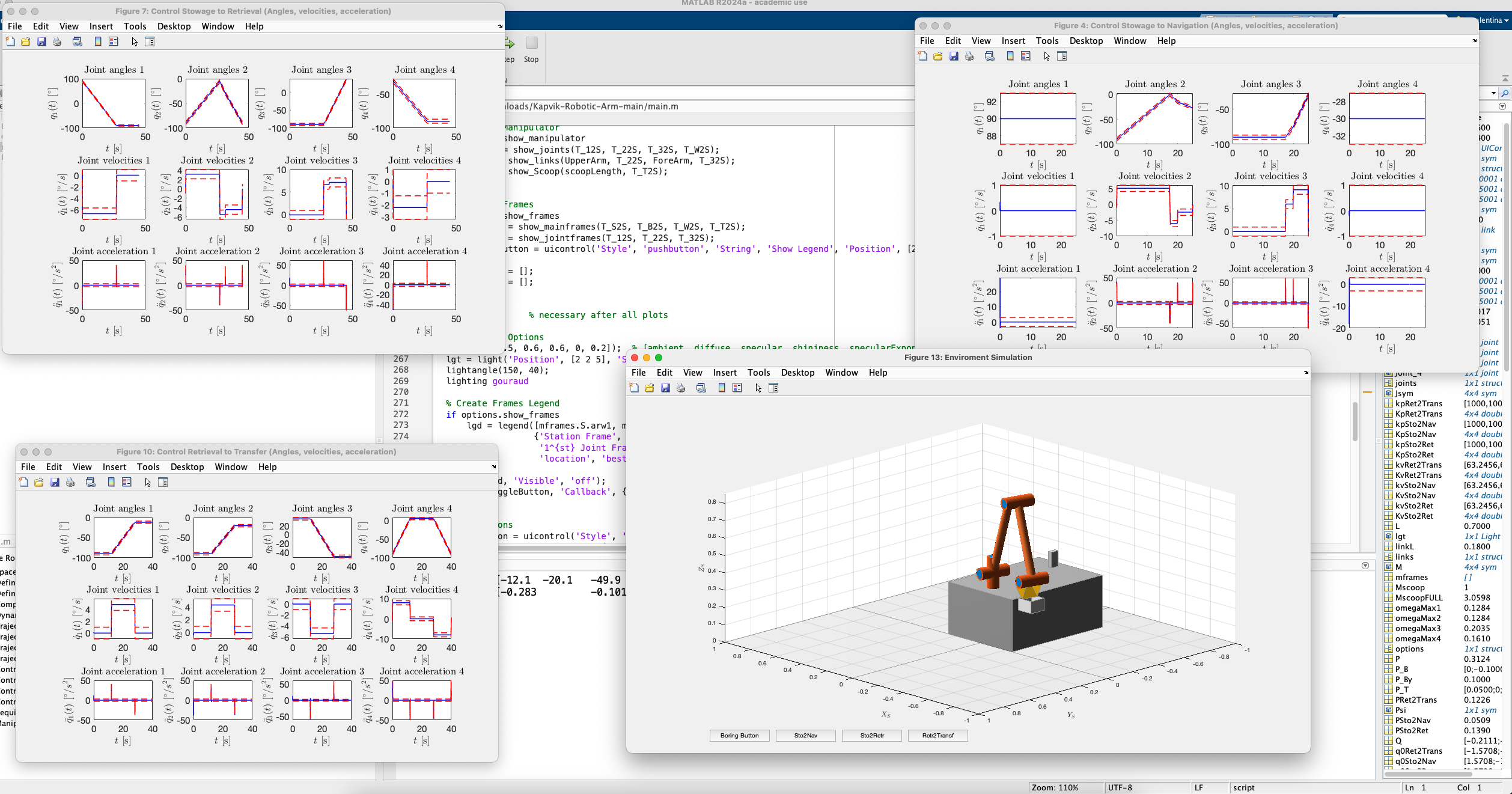
Rover Manipulator Analysis: Krapvik Robotic Arm
Study and modeling of the Krapvik robotic arm comprehending setting of MDH parameters, forward and inverse kinematics, dynamics study, trajectory and control implementation for predetermined tasks.
Programming Language: Matlab
Go check it out
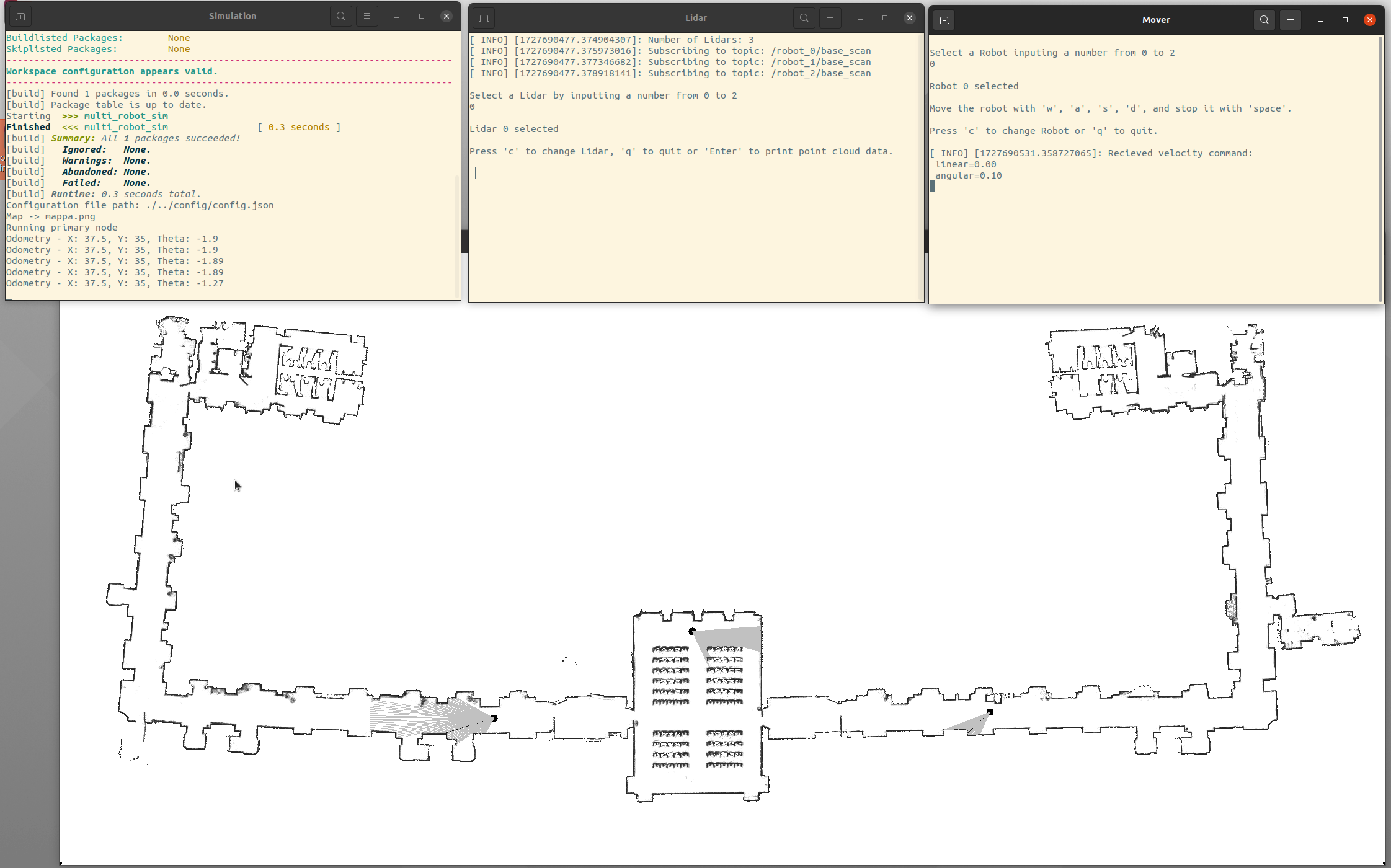
Multi-Robot Simulator
Implementation of a multi-robot simulator in wich 3 robots can be moved in a space and detect obstacles with the use of a lidar sensor. Integration of sensor and movement in the ambient is performed by ROS Nodes.
Programming Language: C++, ROS
Go check it out